
Bij computergebruik kan de CAN-interface een gedeelde grens zijn tussen de twee afzonderlijke delen van een systeemconversatie-informatie. Het gesprek kan plaatsvinden tussen computerhardware, software, mensen, randapparatuur en combinaties hiervan. Sommige hardwareapparaten van een computer houden namelijk van een touchscreen omdat een touchscreen kan informatie delen en ontvangen via de interface, terwijl andere apparaten zoals een microfoon, muis slechts één manier zijn. Er zijn voornamelijk twee soorten interfaces zoals hardware-interfacing en software-interfacing. Hardware-interfaces worden gebruikt in veel van de apparaten zoals invoer-, uitvoerapparaten, bussen en opslagapparaten. Deze CAN-interface kan worden gedefinieerd door de logische signalen. Een software-interface kan in een breed scala op verschillende niveaus beschikbaar zijn. Een besturingssysteem kan een interface hebben met verschillende onderdelen van de hardware. De programma's of applicaties op het Het besturingssysteem moet mogelijk communiceren via streams en bij objectgeoriënteerd programmeren moeten objecten in elke toepassing via methoden communiceren.

KAN BUS
De CAN-bus is in 1983 ontwikkeld door Robert Bosch GmbH. Dit protocol werd in 1986 vrijgegeven tijdens het SAE Congress (Society of Automobile Engineers) in Detroit, Michigan. De eerste CAN-protocol werd geproduceerd door Philips en Intel en op de markt gebracht in het jaar 1987. Maar de BMW Series-8 was het eerste voertuig met een op CAN-protocol gebaseerd multiplex bedradingssysteem.

KAN BUS
De volledige vorm van de CAN is een controller area netwerk Het is een soort autobus die voornamelijk is ontworpen om verschillende mogelijk te maken apparaten en microcontrollers om met elkaar te communiceren zonder een hostcomputer. Dit protocol is gebaseerd op een bericht en voornamelijk bedoeld voor elektrische bedrading in auto's. Bosch publiceerde verschillende versies van de CAN en in het jaar 1991 verscheen de nieuwste CAN 2.0.
CAN bestaat voornamelijk uit twee delen, zoals deel A en deel B, waar deel A een 11-bits identifier is en het is in het standaardformaat. Deel B is een 29-bits identificator en heeft de uitgebreide indeling. Een CAN die 11-bit identifiers gebruikt, wordt AN 2.0A genoemd en een CAN die 29-bit identifiers gebruikt, wordt CAN 2.0B genoemd
Koppeling van CAN naar USB
De koppeling van CAN naar USB is een eenvoudig apparaat dat wordt gebruikt om de CAN-bus te bewaken. Dit apparaat maakt gebruik van de NUC140LC1CN 32 K Cortexes-M0 microprocessor. Het heeft zowel CAN- als USB-randapparatuur.
De belangrijkste kenmerken van de interface van CAN naar USB zijn
- Het is heel eenvoudig te ontwerpen
- Goed afgestemd op het protocol LAWICEL CANUSB
- Zichzelf blootstellen als een apparaat zoals FTDI USB
- Het ondersteunt CAN 2.0B 29-bit en CAN 2.0A 11-bit frames
- Het bestaat uit een interne berichtenbuffer (FIFO CAN)
- Het wordt aangedreven door een USB-poort
- Voor firmware-updates wordt een massaopslagapparaat (Flash-resident USB) gebruikt
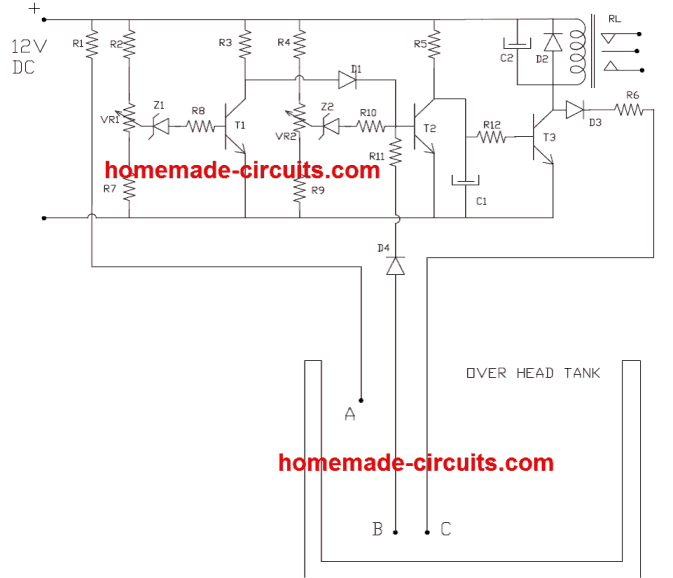
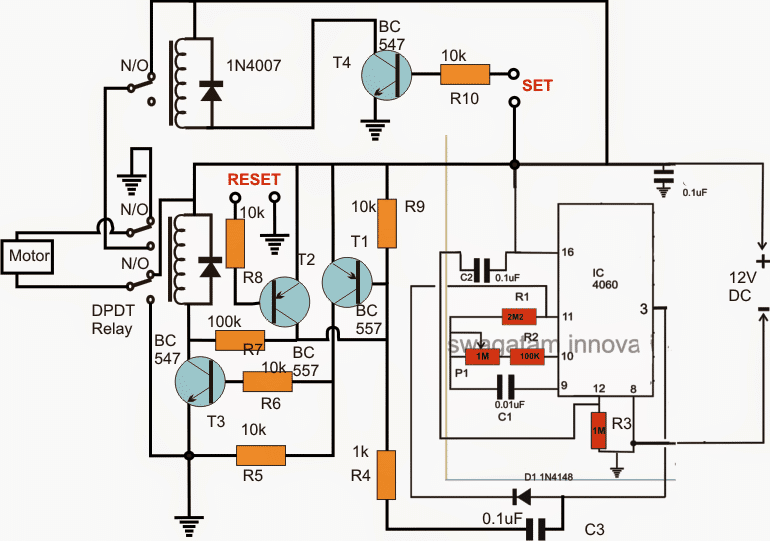
Schematisch diagram
De circuitconfiguratie van de interface van CAN naar USB wordt hieronder weergegeven. Een CAN-transformator wordt gebruikt om het NUC140 CAN-apparaat te laten communiceren met de CAN-bus. De chip TJA1051T lost het doel van NXP op. De microprocessor NUC140 kan werken met een 5V voeding, er is geen extra 3.3V spanningsregelaar nodig. Deze handige opstelling maakt een eenvoudige taak het implementeren van CAN naar USB-interface.

Schematisch diagram
De schakeling is opgebouwd met drie statusleds namelijk D1, D2 en D3.
- Hier zegt de status van de D1-diode dat USB is aangesloten op de host
- Hier zegt de status van de D2-diode die activiteit van CAN-bus
- De fouten van de CAN-bus kunnen worden aangegeven door een D3-diode
De NUC140-microprocessor heeft geen geïntegreerde opstartlader en de beste manier om te programmeren is alleen de Nuvoton ICP-programmeur en ARM SWD-interface (Serial Wire Debug). Als de bootloader eerder is gedumpt met een programma, kan deze worden geactiveerd. Als u de JP1 aansluit voordat u de interface van stroom voorziet, wordt de bootloader geactiveerd.
Opstartlader
Het flashgeheugen van de NUC140LC1-microprocessor is opgedeeld in twee delen. Ze voeren gebruikersprogrammacode en bootloader uit. De grootte van de opstartlader en het uitvoerende gebruikersprogramma is 4K en 32K. Hier wordt de MSD-bootloader (Mass Storage Device) van Nuvoton gebruikt om een volledig functionele USB-bootloader te bouwen. De bootloader wordt geactiveerd door een JP1-jumper aan te sluiten. Dus ten slotte moet een verwisselbare schijf zichtbaar zijn in het hostbestandssysteem met een grootte van 32 KB. Kopieer en plak gewoon de update van CAN naar USB-firmware naar de bootloader-drive. Koppel de USB-kabel los, koppel de jumper los en sluit deze weer aan. De update van nieuwe firmware zou nu actief moeten zijn.

Opstartlader
CAN-naar-USB-interface programmeren en NuTiny-SDK-140
Programmering van microprocessor De NUC140 heeft de Nuvoton ICP-programmeertoepassing en de Nu-Link-programmeur van Nuvoton nodig. Maar hier is de NuTiny-SDK-140 (NUC140-demobord) verkrijgbaar bij Digi-Key. Het bestaat uit twee delen, zoals Nu-Link-programmeurs en het deel met NUC140-chip. Dit bord is zelfs geperforeerd om het deel van de Nu-Link te scheiden. Eigenlijk kun je dit apparaat exclusief ontwerpen rond het NUC140-demobord, de enige extra CAN-transceiver-chip is dan essentieel.

NUC140-bord
Dit gaat dus allemaal over CAN-interface met USB inclusief, CAN-bus, interface CAN naar USB, schematisch diagram, opstartlader en NUC140 microprocessor. We hopen dat u dit concept beter begrijpt. Bovendien kunt u bij eventuele vragen over dit artikel uw waardevolle suggesties geven door in de commentaarsectie hieronder te reageren. Hier is een vraag voor u, wat zijn de toepassingen van de CAN-interface?
Fotocredits:
- CAN naar USB-interface saelig
- KAN BUS canbuskit
- NUC140 instructables







{kind=link}
{kind=link}
{kind=link}