De post legt een eenvoudig obstakel uit om robotcircuits te vermijden zonder microcontroller en zonder speciale motorstuurcircuits of IC's te gebruiken. Het idee was aangevraagd door de heer Faiyyaz
Het ontwerp
In feite heeft het de vorm van een bewegend voertuig die in staat is om potentiële obstakels op zijn pad te detecteren en te vermijden en zijn richting op de juiste manier te veranderen zodat zijn beweging ononderbroken blijft, eenvoudig!
De bediening is dus automatisch zonder enige handmatige of menselijke tussenkomst.
Het gepresenteerde idee van een obstakel vermijdende robot zonder microcontroller, zoals de naam suggereert, maakt geen gebruik van een microcontroller en is daarom uiterst eenvoudig te bouwen en geschikt voor elke nieuwe hobbyist.
Bij het ontwerpen van het circuit realiseerde ik me dat om het principe te implementeren, op zijn minst een paar obstakelsensormodules nodig zouden zijn, omdat het gebruik van een enkele module een onregelmatige beweging van de motor kan veroorzaken en niet kan bijdragen aan een soepele omleiding of het draaien van het voertuig naar een vrij pad.
De opstelling van de voertuigmotor lijkt veel op de afstandsbediening speelgoedauto die ik had besproken in een van de eerdere berichten.
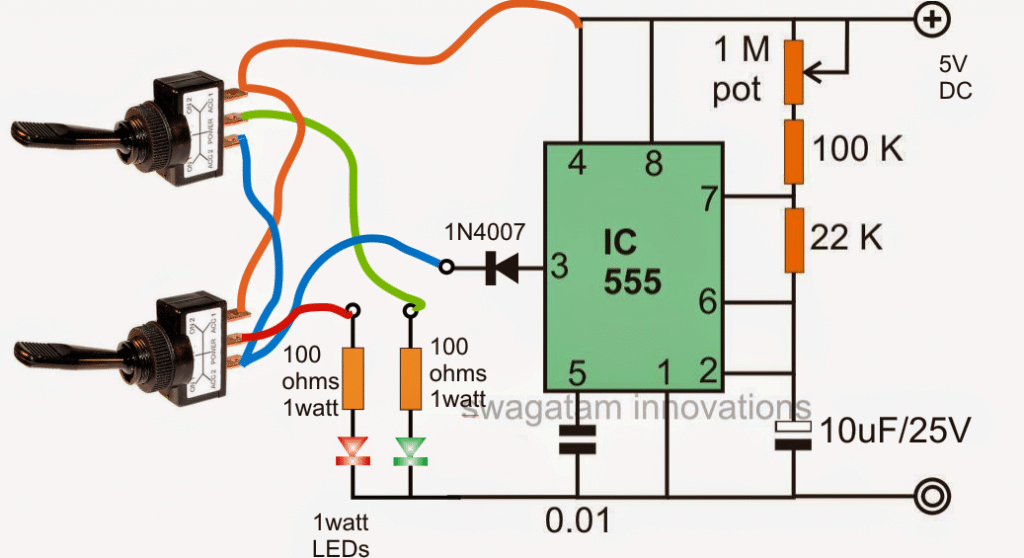
Het volgende diagram geeft een van de modules van het systeem weer, en daarom zijn er twee of een paar van dergelijke modules nodig aan de rechter- en linkerkant van het voertuig.
Het idee is eenvoudig en werkt zonder microcontroller en zonder speciale motorstuur-IC's. Dat betekent dat je het kunt maken zonder enige vorm van codering en zonder enige vorm van complexe motorbesturing IC ..... en het circuit stelt je in staat om elke DC-motor te gebruiken, ongeacht zijn vermogen, dus zelfs obstakels met een hoog vermogen die voertuigen vermijden, kunnen worden gemaakt met behulp van dit circuit dat normaal gesproken wordt gebruikt in winkelcentra en soortgelijke winkels.
Schakelschema

Laten we nu proberen het bovenstaande circuit te begrijpen met behulp van de volgende uitleg:
Hoe het werkt
De IC 555 is geconfigureerd als een IR-zender en is ingesteld om een constante frequentie van 38 kHz te genereren, terwijl het aangrenzende getransistoriseerde circuit is geconfigureerd als de ontvangertrap of de IR-sensortrap.
Laten we aannemen dat het de rechtermodule is, en stel dat deze module de eerste is die een obstakel in het pad detecteert.
Dus zodra een obstakel wordt gedetecteerd, wordt de 38 kHz-frequentie die wordt gegenereerd door de 555 IC gereflecteerd naar de sensor van het aangrenzende ontvangercircuit.
De ontvanger activeert onmiddellijk de bijbehorende transistors zodat de laatste stuurtransistor niet kan geleiden.
Nu wordt verondersteld dat de motor die wordt bestuurd door deze transistor zich aan de linkerkant van het voertuig bevindt, dat wil zeggen aan de andere kant van deze module ... op dezelfde manier wordt de motor aan de rechterkant feitelijk bestuurd door de linkermodule .
Als de hierboven aangenomen obstakeldetectormodule aan de rechterkant wordt geactiveerd, stopt het dus de motor aan de linkerkant, terwijl de motor aan de rechterkant normaal kan bewegen.
Deze situatie heeft tot gevolg dat het voertuig gedwongen wordt een omleiding naar links te nemen ... wat betekent dat de veronderstelde linkermodule nu nog sterkere obstakelsignalen begint te krijgen en het voertuig blijft dwingen om harder te rijden op de voortdurende omleiding totdat het het obstakel volledig heeft vermeden . De module ontvangt nu geen obstakelsignalen meer en het voertuig begint normaal vooruit te rijden op zijn nieuwe pad.
Terwijl de bovenstaande omleiding wordt uitgevoerd, wordt de linkermodule gedwongen om steeds meer geïsoleerd en weg van het obstakel te raken, zodat deze niet de kans krijgt om zich in de procedure te mengen en een schone en soepele omleiding van het voertuig mogelijk maakt.
Precies dezelfde procedures worden geïmplementeerd in het geval dat de linkermodule toevallig het obstakel voor de rechtermodule detecteert, waarbij het voertuig gedwongen wordt om steeds harder naar de rechterkant te rijden.
We kunnen ook een 'uitschakelen' circuitstap in de module zien die met elkaar zijn verbonden over de linker- en de rechtermodules. Deze fase is met opzet geïntroduceerd om ervoor te zorgen dat beide modules nooit samen worden geactiveerd.
Als de linkermodule bijvoorbeeld als eerste een obstakel detecteert, wordt de rechtermodule onmiddellijk uitgeschakeld en wordt de omleiding van het voertuig naar rechts gestart en vice versa.
Het sensor-IC kan een standaard TSOP17XX-serie
Voor meer informatie over de bovenstaande sensor-IC kunt u leren hoe TSOP1738 IC aan te sluiten
En de motor moet worden uitgerust met versnellingsbakken zodat de beweging oorspronkelijk op een gecontroleerd niveau wordt gehouden.
Wiel instellen
De volledige opbouw van de linker- en rechtermodule en de bijbehorende elektrische aansluitingen is te zien in onderstaande figuur:

Bijwerken
Een beetje nadenken leert ons dat het bovenstaande eenvoudige obstakelvermijdende robotcircuit ook zou kunnen worden geïmplementeerd door een enkele module te gebruiken in plaats van de twee.
Met een enkele module kan het voertuig echter een eenzijdige omleiding uitvoeren elke keer dat het een obstakel detecteert, daarom kan het systeem worden geconfigureerd om een omleiding met de klok mee of tegen de klok in uit te voeren, afhankelijk van welke motor is verbonden met het circuit voor de acties.
De voorbeeldopstelling kan worden gevisualiseerd in de volgende afbeelding:

Het lijkt er echter op dat er een probleem is met de bovenstaande opstelling van een enkele motor. Stel dat het voertuig aan de linkerkant een rechte hoek tegenkomt. Dit zal het voertuig dwingen tegen de klok in te blijven rijden, totdat het een U-bocht maakt en terug begint te rijden in dezelfde richting als waar het was begonnen. Dit is niet iets dat de gebruiker zou waarderen.
Vorige: SMD-weerstanden - Inleiding en werking Volgende: Hoe een versnellingsmeter werkt


![Bedieningslichten, ventilator, met behulp van tv-afstandsbediening [volledig schakelschema]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)