De post legt een automatische start- en stopcircuit van de dompelpomp uit met droogloopbeveiliging om een automatische AAN / UIT-schakeling van de motor te implementeren in reactie op de hoge / lage waterstanden van de bovenliggende tank.
Circuit concept
In een van de vorige berichten hebben we een soortgelijk concept geleerd dat ook een automatische start / stop-functie van de schakelaar van de dompelpomp , maar aangezien hier de betrokken sensoren vlotterschakelaars , het ontwerp zag er wat ingewikkeld uit en niet voor iedereen geschikt.
Bovendien was de droogloopbeveiliging die in het ontwerp was opgenomen, afhankelijk van de temperatuurverandering van de motor voor het uitvoeren van de vereiste bescherming van de motor. Ook deze functie was niet al te wenselijk voor een leek, aangezien het installeren van de hittesensor boven de ondergrondse motor niet eenvoudig was.
In deze post heb ik geprobeerd al deze problemen te elimineren en een circuit ontworpen dat de aanwezigheid van water alleen detecteert via metalen sensoren die zijn ondergedompeld in de relevante waterbronnen.
Circuit werking
Laten we de voorgestelde automatische dompelpomp start, stop circuit met droogloopbeveiliging begrijpen.

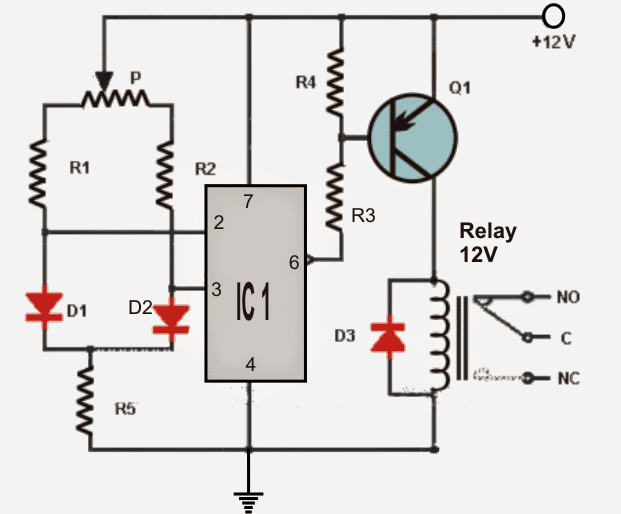
Een enkele IC 4049 kan worden gezien tijdens de gehele detectie, start stop acties en de uitvoering van de droogloopbeveiliging.
De poorten die hier betrokken zijn, zijn 6 NIET-poorten van de IC 4049 die in feite zijn opgetuigd als inverters (voor het omkeren van de polariteit van de toegevoerde spanning aan de ingang).
Laten we aannemen dat het water in de bovenliggende tank onder de gewenste onderste drempel komt, zoals aangegeven in het bovenstaande diagram.
De situatie verwijdert het positieve potentiaal dat door het water naar de ingang van N1 werd geleverd. N1 reageert hierop door een positief te laten verschijnen aan de uitgangspen, waardoor C1 onmiddellijk begint met opladen via R2.
De bovenstaande voorwaarde maakt het ook mogelijk dat het positieve van de uitgang van N1 de ingang van N2 bereikt, wat op zijn beurt een laag of negatief produceert aan de basis van T1 via R3 ... het bijbehorende relais schakelt nu AAN en activeert de 'START 'knop van de contactor ... maar de activering van het relais duurt slechts een seconde of zo totdat C1 volledig is opgeladen, deze lengte kan worden ingesteld door de waarden van C1 / R2 op de juiste manier aan te passen.
Laten we voorlopig de N5 / N6-fase vergeten die is gepositioneerd voor de implementatie van de droogloopbeveiliging.
Laten we aannemen dat de pomp draait en water in de afgebeelde OH-tank giet.
Het water begint zich nu in de tank te vullen, totdat het niveau de rand van de tank bereikt en de sensor die overeenkomt met de N3-ingang 'kust'.
Hierdoor kan een positief door het water de input van N3 voeden, waardoor zijn output laag (negatief) kan worden, waardoor C2 onmiddellijk begint te laden via R5, maar tijdens het proces wordt de input van N4 ook laag en keert zijn output om naar een hoge vraag aan de relaisbestuurder om het relais te activeren.
Het bovenste relais wordt onmiddellijk geactiveerd, maar slechts voor een seconde, waarbij de 'STOP'-knop van de contactgever wordt omgeschakeld en de pompmotor wordt gestopt. De relaistiming kan worden ingesteld door de waarden van C2 / R5 op de juiste manier aan te passen.
De bovenstaande uitleg zorgt voor de automatische waterpeilregeling door de dompelbare start / stop-knop door de relais van het circuit te schakelen. Nu kan het interessant zijn om te leren hoe de droogloopbeveiliging is ontworpen om droogloopgevaar te voorkomen bij afwezigheid van water in de boorput of een ondergrondse tank.
Laten we teruggaan naar de uitgangssituatie wanneer het water in de OHT onder de onderste drempel is gezakt en een dieptepunt heeft gekregen aan de ingang van N1 ... wat ook een dieptepunt geeft aan de ingang N5.
De N5-output wordt hierdoor hoog en levert een positieve voeding voor C3 zodat deze kan beginnen met opladen.
Aangezien het proces echter ook verondersteld wordt de motor te starten, kan de pomp, als er water aanwezig is, water in de OHT gaan gieten, dat verondersteld wordt te worden gedetecteerd door de ingang van N6, waardoor de uitgang laag wordt.
Met een lage N6-output, wordt C3 verhinderd om op te laden en blijft de situatie impasse ... en de motor blijft water pompen zonder verandering in de eerder toegelichte procedures.
Maar stel dat de motor droogloopt omdat er geen water in de put zit ... zoals hierboven vermeld begint C3 met opladen en wordt de uitgang van N6 nooit negatief om te voorkomen dat C3 volledig wordt opgeladen ... daarom is C3 in staat om het opladen te voltooien binnen een vooraf bepaalde tijdspanne (bepaald door C3 / R8) en uiteindelijk een hoge (positieve) aan de ingang N3 te produceren.
N3 reageert hierop op dezelfde manier als wanneer het water in de tank wordt gedetecteerd bij de bovenste drempel ... en vraagt om het schakelen van het bovenste relais en het stoppen van de motor om verder te draaien.
De droogloopbeveiliging voor het besproken start-, stopcircuit van de dompelpomp is hiermee uitgevoerd.
Onderdelen lijst
- R1, R4, R9 = 6M8
- R3, R7, R6 = 10 K.
- R8 = 100 K.
- R2, R5, C1, C2, C3 = door experimenten te veranderen
- N1 ------ N6 = IC 4049
- ALLE DIODEN = 1N4007
- RELAIS = 12V, 10AMP
- T1 = BC557
- T2 = BC547
Een paar: Motorregelaar, gelijkrichtertestercircuit Volgende: LED-simulatorcircuit met zwaailicht