In de periode 1840 zelf is de ontwikkeling van een lineaire inductiemotor begonnen door Charles Wheatstone in Londen, maar dit lijkt onpraktisch. Terwijl in het jaar 1935 het bedieningsmodel in ontwikkeling werd gebracht door Hermann Kemper, en de bedieningsversie op ware grootte werd geïntroduceerd door Eric in het jaar 1940. Daarna werd dit apparaat in veel toepassingen in vele industrieën gebruikt. In dit artikel wordt Lineair duidelijk uitgelegd Inductiemotor , zijn werkingsprincipe, prestaties, ontwerp, constructie, voor- en nadelen en belangrijkste toepassingen. Laten we eens in het concept duiken.
Wat is een lineaire inductiemotor?
Lineaire inductiemotor wordt afgekort als LIM en dit is de verbeterde versie van de roterende inductiemotor waarbij de output een lineaire translatiebeweging is in plaats van een roterende beweging. Dit apparaat genereert een andere lineaire beweging en kracht dan het rotatiekoppel. Het ontwerp en de functionaliteit van de lineaire inductie motor kan worden getoond in de onderstaande figuur door een radicaal gevormde snede in de draaiende inductie te maken en zo de sectie waterpas te maken.
De output is een genivelleerde stator of de bovenkant met ijzeren lamellen, waar deze driefasige, meerpolige wikkelingen dragen met geleiders die in 90 zijn0hoeken op de bewegingsrichting. Het bestaat ook uit een door een eekhoorn ingesloten soort wikkeling, terwijl het over het algemeen wordt geleverd met een eindeloze aluminium of koper gemaakte plaat die op een solide geplateerde ijzeren drager wordt gehouden.
Ongeacht de naam van het apparaat, niet alle lineaire inductiemotoren genereren lineaire beweging, slechts enkele van de apparaten die worden gegenereerd, worden gebruikt voor het leveren van omwentelingen met grote diameters en het gebruik van de eindeloze primaire secties is duurder.
Ontwerp
De fundamentele constructie en lineair inductiemotorontwerp bijna hetzelfde als driefasige inductie motor, ook al lijkt hij niet op die van een normale inductiemotor. Wanneer een snede wordt gevormd in het statorgedeelte van de meerfasige inductiemotor en deze op een plat oppervlak wordt geplaatst, dan ontstaat het primaire gedeelte van de lineaire inductiemotor. Op dezelfde manier, wanneer een snede wordt gevormd in het rotorgedeelte van de meerfasige inductiemotor en geplaatst op een plat oppervlak, dan ontstaat het secundaire gedeelte van de lineaire inductiemotor.
Lineaire inductiemotorconstructie Daarnaast bestaat er een ander model van de lineaire inductiemotor die wordt gebruikt voor het verbeteren van de prestaties en dit wordt DLIM genoemd, wat een dubbelzijdige lineaire inductiemotor is. Dit model heeft een primaire sectie die aan een ander uiteinde van de secundaire sectie wordt geplaatst. Dit ontwerp wordt gebruikt om het gebruik van flux aan zowel de primaire als de secundaire zijde te verbeteren. Dit is de constructie van een lineaire inductiemotor
Werkingsprincipe van lineaire inductiemotor
De onderstaande sectie geeft een duidelijke uitleg van de werking van lineaire inductiemotor
Hier, wanneer het primaire gedeelte van de motor wordt bekrachtigd door een gebalanceerde driefasige voeding te gebruiken, zal er fluxbeweging zijn over de gehele lengte van het primaire gedeelte. Deze lineaire beweging van het magnetische veld is gelijk aan het draaiende magnetische veld in het statorgedeelte van de driefasige inductiemotor.
Hiermee zal er de inductie van elektrische stroom in de geleiders van de secundaire wikkeling zijn vanwege de relatieve beweging tussen de geleider en flux beweging De stroom die wordt geïnduceerd, wordt in verband gebracht met de fluxbeweging om een lineaire krachtkracht te genereren en dit wordt weergegeven door
Vs = 2tfs m / sec
Wanneer de primaire sectie constant wordt gemaakt en de tweede sectie beweging heeft, dan trekt de kracht de secundaire sectie zelf in zijn richting en dit resulteert in het genereren van de noodzakelijke rechtlijnige beweging. Wanneer het systeem van stroom wordt voorzien, zal het gegenereerde veld een lineair bewegend veld verschaffen waarin de snelheid wordt weergegeven volgens de bovengenoemde vergelijking.
In de vergelijking komt ‘fs’ overeen met de hoeveelheid voedingsfrequentiemeting in Hz
‘Vs’ komt overeen met het lineaire bewegende veld gemeten in m / sec
‘T’ komt overeen met de steek van de lineaire pool, wat de afstand tussen pool tot pool betekent, gemeten in meters
V = (1-s) Vs
In overeenstemming met dezelfde rechtvaardiging, in de toestand van de inductiemotor, houdt de secundaire hardloper niet dezelfde snelheid vast als de snelheidswaarde van de magnetisch veld Hierdoor ontstaat er een slip.
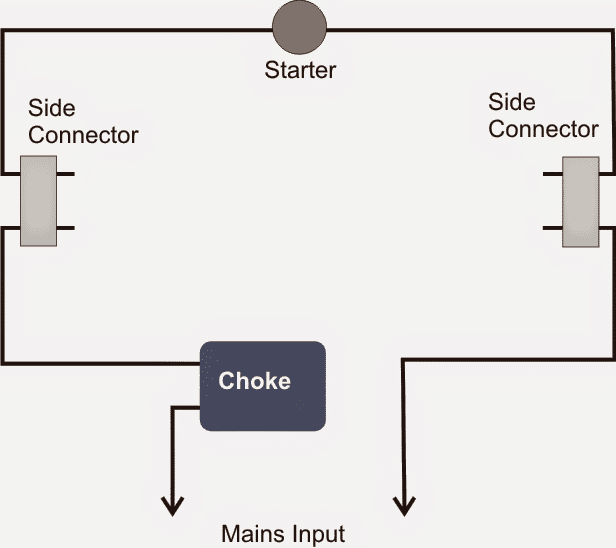
De lineaire inductiemotor diagram wordt als volgt weergegeven:

Kenmerken van lineaire inductiemotor
Enkele van de LIM-kenmerken zijn:
Einde effect
In tegenstelling tot het type motor met circulaire inductie, heeft LIM een karakteristiek genaamd 'End Effect'. Het eindeffect bestaat uit efficiëntie- en prestatieverliezen die het gevolg zijn van magnetische energie die wordt afgevoerd en neergelaten aan het einde van de primaire sectie door de relatieve beweging van de primaire en secundaire secties.
Alleen met het secundaire gedeelte lijkt de functionaliteit van het apparaat hetzelfde te zijn als de roterende machine, vereist dat het bijna twee polen van elkaar verwijderd is, maar met een minimale primaire vermindering van de stuwkracht die optreedt bij lage slip, is het nog steeds 8 of meer palen langer. Met het bestaan van eindeffecten hebben LIM-apparaten niet het vermogen om licht te laten werken, terwijl de algemene soort inductiemotoren dit vermogen bezit om de motor te laten werken met een dichter synchroon veld onder minimale belastingsomstandigheden. Daarentegen genereert het eindeffect overeenkomstige verliezen bij lineaire motoren.
Stuwkracht
De aandrijving die wordt veroorzaakt door de LIM-apparaten is bijna dezelfde als die van algemene inductiemotoren. Deze aandrijfkrachten vertegenwoordigen ongeveer dezelfde karakteristieke curve als slip, hoewel gemoduleerd door de eindeffecten. Dit wordt ook wel een Tractive-inspanning genoemd. Het wordt getoond door
F = Pg / Vs gemeten in Newton
Levitatie
Bovendien hebben LIM-apparaten, in tegenstelling tot de roterende motor, een elektrodynamische levitatiekracht die nul afleest bij ‘0’ slip en dit genereert een ongeveer vaste hoeveelheid opening wanneer de slip in een van de richtingen toeneemt. Dit gebeurt alleen bij enkelzijdige motoren en deze eigenschap zal in het algemeen niet voorkomen wanneer een ijzeren steunplaat wordt gebruikt voor het secundaire deel, omdat hierdoor een aantrekkingskracht ontstaat die de hefdruk overwint.
Dwarsrandeffect
Lineaire inductiemotoren vertonen ook een transversaal randeffect, wat inhoudt dat de stroompaden die in dezelfde bewegingsrichting zijn verliezen ontwikkelen en vanwege deze paden zal er een vermindering van de effectieve stuwkracht zijn. Omdat hierdoor een dwarsrandeffect optreedt.
Prestatie
De prestaties van de lineaire inductiemotor kan worden gekend door de hieronder toegelichte theorie waarin de synchrone snelheid van de bewegende golf wordt weergegeven door
Vs = 2f (merg van de lineaire pool) …… ..m / s
‘F’ komt overeen met de geleverde frequentie gemeten in Hertz
In het geval van een roterende inductiemotor is de snelheid van de secundaire sectie in de LIM kleiner dan die van de synchrone snelheid en wordt deze gegeven door
Vr = Vs (1-s), ‘s’ is de LIM-slip en dat is het ook
S = (Vs - Vr) / Vs
De lineaire kracht wordt gegeven door
F = kracht van de luchtspleet / Vs
De vorm van de stuwkrachtsnelheidscurve van LIM is bijna identiek aan die van de snelheid versus koppelcurve van de roterende inductiemotor. Wanneer er een vergelijking is tussen de LIM en de roterende inductiemotor, heeft de lineaire inductiemotor een grotere luchtspleet nodig en daarom zal er een verhoogde magnetisatiestroom zijn en zullen de factoren zoals prestatie en arbeidsfactor minimaal zijn.
In het geval van RIM is het oppervlak van de stator- en rotorsecties vergelijkbaar, terwijl in LIM het ene korter is dan het andere. Bij constante snelheid zal het kortere gedeelte een continue doorgang hebben dan dat van het andere.
Voor-en nadelen
De voordelen van de lineaire inductiemotor zijn:
De cruciale voordelen van LIM zijn:
- Er zijn geen magnetische aantrekkingskracht op het moment van montage. Omdat LIM-apparaten geen permanente magneten hebben, is er geen aantrekkingskracht op het moment dat het systeem wordt samengesteld.
- Lineaire inductiemotoren hebben ook het voordeel dat ze lange lengtes kunnen afleggen. Deze apparaten worden voornamelijk geïmplementeerd voor toepassingen met een lange lengte, omdat secundaire secties niet worden meegeleverd met permanente magneten. Het ontbreken van magneten in de tweede sectie maakt dat deze apparaten niet duur zijn omdat de prijs van het apparaat cruciaal ligt in de ontwikkeling van een magnetische baan.
- Effectief bruikbaar voor zware doeleinden. Lineaire inductiemotoren worden voornamelijk gebruikt in lineaire motoromstandigheden onder hoge druk, waar ze aanwezig zijn met een constante kracht van bijna 25 g aan versnellingen en enkele honderden ponden.
De nadelen van lineaire inductiemotor zijn:
- De constructie van LIM-apparaten is enigszins gecompliceerd omdat ze geavanceerde besturingsalgoritmen vereisen.
- Deze hebben verhoogde aantrekkingskracht op het moment van operatie.
- Toont geen kracht op het moment van stilstand.
- De grotere fysieke grootte van het apparaat betekent dat de verpakkingsgrootte groter is.
- Vereist meer vermogen voor functionaliteit. In vergelijking met lineaire motoren met permanente magneten is het rendement minder en genereert het meer warmte. Hiervoor zijn verder waterkoelinrichtingen nodig die in de constructie moeten worden opgenomen.
Toepassingen van lineaire inductiemotor
Het exclusieve gebruik van lineaire inductiemotoren is te vinden in toepassingen zoals
- Metalen transportbanden
- Mechanische besturingsapparatuur
- Actuatoren voor stroomonderbrekers met hoge snelheid
- Shuttle-boosting-toepassingen
Over het geheel genomen gaat het hier allemaal om het concept van lineaire inductiemotoren. Dit artikel heeft een duidelijke uitleg gegeven van lineaire inductiemotorprincipes, ontwerp, werking, gebruik, voordelen en nadelen. Het is verder nodig om te weten hoe de snelheid v / s poolhoogte is kenmerken in lineaire inductiemotor uitvoeren?