Als we het woord besturingssysteem horen, denken we eerst aan het besturingssysteem dat wordt gebruikt in laptops en computers. Over het algemeen gebruiken we verschillende soorten besturingssystemen zoals Windows XP, Linux, Ubuntu, Windows 7,8.8.1 en 10. In de smartphones zijn de besturingssystemen KitKat, Jellybean, marshmallow en Nougat. In een digitaal elektronisch apparaat is er een soort besturingssysteem dat is ontwikkeld door het microcontroller-programma Er zijn verschillende soorten besturingssystemen om te ontwikkelen voor de microcontroller, maar hier hebben we het realtime besturingssysteem besproken.
Wat is een realtime besturingssysteem?
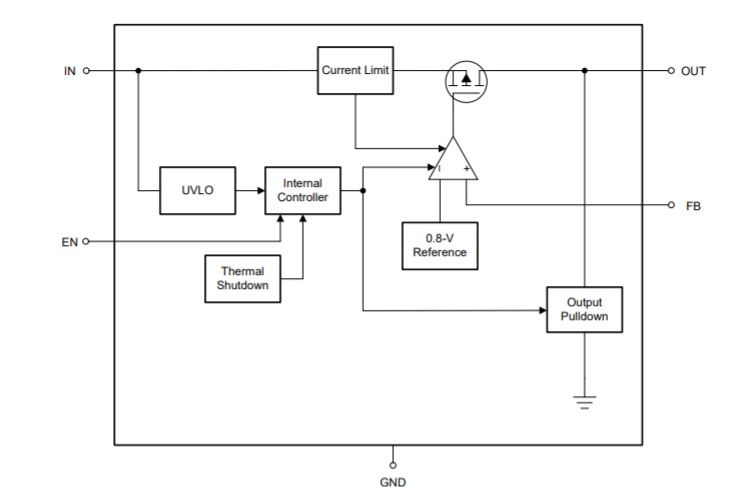
De RTOS is een besturingssysteem, het is een brein van het real-time systeem en reageert onmiddellijk op inputs. In de RTOS zal de taak op de aangegeven tijd en de reacties op onvoorspelbare gebeurtenissen op een voorspelbare manier worden voltooid. De structuur van de RTOS wordt hieronder weergegeven.

Structuur van RTOS
Soorten RTOS
Er zijn drie verschillende soorten RTOS die volgen
- Zacht real-time besturingssysteem
- Hard real-time besturingssysteem
- Stevig real-time besturingssysteem

Soorten RTOS
Zacht real-time besturingssysteem
Het soft real-time besturingssysteem heeft bepaalde deadlines, kan gemist worden en zal de actie ondernemen op een tijdstip t = 0 +. Het zachte real-time besturingssysteem is een type besturingssysteem en het bevat geen beperking tot extreme regels. De kritieke tijd van dit besturingssysteem is tot op zekere hoogte vertraagd. De voorbeelden van dit besturingssysteem zijn de digitale camera, mobiele telefoons en online data etc.

Zacht real-time besturingssysteem
Hard real-time besturingssysteem
Dit is ook een type besturingssysteem en wordt voorspeld door een deadline. De voorspelde deadlines reageren op een tijdstip t = 0. Enkele voorbeelden van dit besturingssysteem zijn airbagcontrole in auto's, antiblokkeerremmen en motorregelsysteem enz.
Stevig real-time besturingssysteem
In het bedrijf real-time heeft een besturingssysteem bepaalde tijdsbeperkingen, deze zijn niet strikt en kunnen ongewenste effecten veroorzaken. Voorbeelden van dit besturingssysteem zijn een visuele inspectie in industriële automatisering.
Werken met realtime besturingssysteem
Er zijn verschillende soorten basisfunctionaliteiten van een RTOS die volgen
- Op prioriteit gebaseerde planner
- Systeemklokonderbrekingsroutine
- Deterministisch gedrag
- Synchronisatie en berichten
- RTOS-service
Op prioriteit gebaseerde planner
In de op prioriteiten gebaseerde planner bevat de meeste RTOS tussen 32 en 256 mogelijke prioriteiten voor de individuele taken of processen. Deze planner voert het proces uit met de hoogste prioriteit. Als de taak op de CPU wordt uitgevoerd, wordt de taak met de volgende hoogste prioriteit uitgevoerd en worden de processen voortgezet.
In het systeem heeft het proces met de hoogste prioriteit de CPU
- Het loopt te sluiten
- Als de oorspronkelijke taak wordt vervroegd door de nieuwe, wordt een proces met hoge prioriteit gereed gemaakt.
Er zijn drie toestanden van de taken of processen die klaar zijn om te worden uitgevoerd en de andere is geblokkeerd en een beschrijving van elke toestand wordt hieronder gegeven.
Klaar om te rennen
Er wordt gezegd dat het proces klaar is om uit te voeren wanneer het proces alle bronnen heeft om uit te voeren, maar het zou niet in de actieve staat moeten zijn. Dan wordt het geroepen als klaar om te rennen.
Rennen
Als de taak wordt uitgevoerd, wordt er gezegd dat deze een actieve status heeft.
Geblokkeerd
Als het in deze staat niet over voldoende bronnen beschikt om te werken, wordt het naar de geblokkeerde staat gestuurd.
Drie technieken zijn aangepast om de taak te plannen, er volgen hun beschrijving.
Samenwerkende planning
Bij dit type planning wordt de taak uitgevoerd totdat de uitvoering is voltooid
Round Robin-planning
Bij deze planning krijgt elk proces een vast tijdvak toegewezen en moet het proces zijn uitvoering voltooien, anders verliest de taak zijn stroom en gegevensgeneratie.
Preventieve planning
De preventieve planning omvat de prioriteit tijdafhankelijke tijdtoewijzing. In het algemeen worden 256 prioriteitsniveaus gebruikt en elke taak heeft een uniek prioriteitsniveau. Er zijn enkele systemen die het hogere prioriteitsniveau ondersteunen en meerdere taken hebben een aantal prioriteiten.
System Clock Interrupt Routine
Om de tijdgevoelige bewerking uit te voeren, levert de RTOS een soort systeemklokken. Als er een systeemklok van 1 ms is, moet u de taak in 50 ms voltooien. Gewoonlijk is er een API die je volgt om te zeggen 'Maak me wakker in 50 ms'. Daarom zou de taak in de slaappositie zijn totdat de RTOS wakker wordt. We hebben twee mededelingen dat het wakker worden er niet voor zorgt dat het precies op dat moment loopt, het hangt af van de prioriteit en als de hogere prioriteit momenteel actief is, zou het vertraagd zijn.
Deterministisch gedrag
De RTOS beweegt zich tot het uiterste om te beschermen dat of je nu 100 taken of 10 taken hebt uitgevoerd, het geen verschil maakt in de afstand om van context te wisselen en het bepaalt de taak met de volgende hoogste prioriteit. In het primaire gebied deterministisch is de RTOS de interruptafhandeling, wanneer de interruptlijn wordt gesignaleerd, neemt de RTOS onmiddellijk de actie van de juiste interruptserviceroutine en wordt de interrupt zonder enige vertraging afgehandeld.
We moeten zeggen dat de ontwikkelaars van het project de hardware-specifieke ISR's zullen schrijven. Tot nu toe geeft de RTOS de ISR's voor de seriële poorten, systeemklokken en het kan netwerkhardware zijn, maar als er iets speciaals is, zoals pacemakersignalen, actuatoren, enz., Maak geen deel uit van de RTOS.
Dit gaat allemaal over de grove generalisaties en er is een grote verscheidenheid aan implementatie in de RTOS. Sommige RTOS worden anders bediend en de bovenstaande beschrijving is geschikt voor het grote deel van de bestaande RTOS.
Synchronisatie en berichten
De synchronisatie en berichtgeving zorgt voor de communicatie tussen de taak van het ene systeem naar het andere systeem en de berichtendiensten die volgen. Om de interne activiteiten te synchroniseren wordt de eventvlag gebruikt en om de tekstberichten te versturen die we kunnen gebruiken in de mailbox, buizen en berichtenwachtrijen. In de gemeenschappelijke gegevensgebieden worden de semaforen gebruikt.
- Semaforen
- Event vlaggen
- Mailboxen
- Buizen
- Berichtenwachtrijen
RTOS-service
Het belangrijkste onderdeel van het besturingssysteem is de Kernel. Om de hardware te bewaken, moet de taak worden ontlast en moet de kernel verantwoordelijkheden beheren en de bronnen toewijzen. Als de taak niet elke keer de aandacht van de CPU kan trekken, zijn er enkele andere services die door de kernel worden geleverd. De volgende zijn
- Tijdservices
- Afhandelingsservices onderbreken
- Apparaatbeheerdiensten
- Geheugenbeheerdiensten
- Input-output diensten
Voordelen van RTOS
- Wanneer alle bronnen en apparaten inactief zijn, geeft de RTOS maximaal verbruik van het systeem en meer output.
- Wanneer een taak wordt uitgevoerd, is er geen kans om de fout te krijgen, omdat de RTOS foutloos is.
- Geheugentoewijzing is het beste type om te beheren in dit type systeem.
- In dit type systeem is de schakeltijd heel kort.
- Vanwege de kleine omvang van het programma wordt de RTOS gebruikt in de ingebouwd systeem zoals vervoer en anderen.
In dit artikel hebben we besproken hoe het real-time besturingssysteem zal werken. Ik hoop dat je door dit te lezen wat basisinformatie hebt verkregen. Als u vragen heeft over dit artikel of om elektrische projecten uit te voeren , aarzel dan niet om commentaar te geven in het onderstaande gedeelte. Hier is de vraag voor jou, wat zijn de functies van de RTOS?