Robots kunnen worden gebruikt in veel toepassingen in industrieën, militairen, huishoudelijk gebruik. Een van de belangrijkste toepassingen van robots is een aanwinst voor de mens. Of het nu gaat om gevaarlijke situaties zoals het uitbreken van brand of een plek vol landmijnen, robots kunnen gemakkelijk een uitweg vinden voor deze problemen. Laten we dus eens kijken naar deze twee soorten robots: een robot voor het detecteren van landmijnen en een robot voor brandbestrijding
Land Mine Sensing Robot
Hoe landmijnen te voelen met robots?
Een van de belangrijkste toepassingen van robotica is defensie. Een robot in het leger is een op afstand bestuurbaar voertuig met veel unieke eigenschappen. Het kan een robotvoertuig zijn met een camera om te spioneren, een robotvoertuig met een LASER-pistool om doelen te detecteren en te vernietigen, of een robot met een metaaldetector om de aanwezigheid van landmijnen te detecteren.
Een van de traditionele en conventionele manieren van mijndetectie is het gebruik van getrainde contactadvertenties die handmatig naar metalen of mijnen zoeken met behulp van een metaaldetector. Dit is echter onveilig en duur en ook traag.
Om dit probleem op te lossen heeft een veel geavanceerder systeem de voorkeur.
Een aantal manieren om landmijnen te detecteren:
- Met behulp van een robot die een sonde in de grond kan steken die de objecten onder de grond kan detecteren en het soort materiaal kan bepalen.
- Een robot gebruiken met een metaaldetector die de aanwezigheid van geleidende elementen zoals landmijnen kan detecteren en de gebruiker kan alarmeren.
Voordat we verder ingaan op de details van het tweede type - d.w.z. de robot met een metaaldetector, laten we eerst even terugkomen op de twee belangrijke termen: landmijnen en metaaldetector.
NAAR Landmijn is een explosief apparaat dat opzettelijk onder de grond is geplaatst en dat explodeert wanneer het door druk wordt geactiveerd. Volgens een statistisch rapport zijn er ongeveer 100 miljoen landmijnen in 70 landen over de hele wereld. Een eenmaal geplaatste landmijn kan tot 50 jaar meegaan. Is het niet gevaarlijk !!

Een eenvoudige metaaldetector werkt volgens het principe van de wet van Faraday van inductie. Het bestaat uit een spoel die wordt geactiveerd om er een pulserend magnetisch veld omheen te ontwikkelen. Wanneer de spoel in de buurt komt van een geleidend element zoals metaal (een mijn), wordt daarin een elektrische stroom (wervelstroom) geïnduceerd. De geïnduceerde wervelstroom veroorzaakt de ontwikkeling van een elektromagnetisch veld rond het metaal, dat opnieuw wordt uitgezonden naar de spoel die een elektrisch signaal ontwikkelt dat wordt geanalyseerd. Groter is de afstand tussen de spoel en het metaal, zwakker is het magnetische veld.
Een eenvoudig prototype:

Een eenvoudig prototype van een robotvoertuig met metaaldetector
De robot ontwerpen:
Het robotvoertuig bestaat uit de volgende eenheden:
- Een rechthoekige basis om de hele robotstructuur te ondersteunen, bevestigd met twee wielen voor beweging.
- Een paar DC-motoren om de robot de vereiste beweging te geven.
- Een besturingseenheid bestaande uit een RF-ontvanger die commandosignalen ontvangt van een zendereenheid om de motoraandrijving te besturen en de motoren dienovereenkomstig te besturen.
- Een metaaldetectorcircuit samen met een zoemeralarm wordt geactiveerd zodra het metaal wordt gedetecteerd.
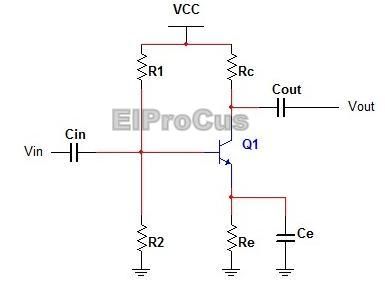
Hoe werkt de robot:
Het metaaldetectorcircuit dat is ingebed in het robotbesturingscircuit bestaat uit een transistor die wordt aangedreven door een afgestemd oscillatorcircuit dat bestaat uit de spoel. Wanneer een metaal wordt gedetecteerd en de elektrische stroom wordt opnieuw door de spoel verzonden, is de transistor1 in de toestand en stuurt een andere transistor2 naar de uit-toestand. Deze transistor3 stuurt op zijn beurt een andere transistor naar de uit-toestand. Deze specifieke transistor 3 is verbonden met een andere transistor 4 die zodanig is verbonden dat deze in staat is wanneer zijn stuurtransistor 3 in uit-toestand is. De transistor 4 is zo aangesloten dat in aan-toestand de zoemer en de LED de juiste voorspanning krijgen en gaan geleiden.

Blokschema van metaaldetectoreenheid
De LED begint te branden en de zoemer begint te rinkelen. Dus wanneer een metaal wordt gedetecteerd, gaat het zoemeralarm af en gaat de LED branden.
De robot besturen:
Het eenvoudige prototype kan worden bestuurd met behulp van RF-communicatie, een communicatiesysteem voor korte afstanden. De commando's worden verzonden met behulp van een zender en ontvangen door een ontvanger die is ingebed in het robotcircuit om de robotbeweging te besturen.

Blokschema van de zendersectie
De zender bestaat uit een reeks drukknoppen zoals vooruit, achteruit, stop, links en rechts die worden ingedrukt om de robot in elke gewenste richting te laten bewegen. De drukknoppen zijn verbonden met de ingangspoort van de microcontroller. De microcontroller ontwikkelt bij het ontvangen van deze signalen een overeenkomstig 4-bits signaal in parallelle vorm over een andere I / O-poort, waarop een encoder-IC is aangesloten. De encoder zet deze signalen om in een seriële vorm van gegevens. De RF-zender moduleert deze seriële gegevens, die via de antenne worden verzonden.

Blokschema van het ontvangergedeelte
Het ontvangergedeelte dat op de robot is gemonteerd, bestaat uit de RF-ontvanger die dit signaal demoduleert. Het decoder-IC ontvangt dit signaal in seriële vorm en ontwikkelt een corresponderende 4 bit parallelle data aan zijn uitgang. De microcontroller ontvangt deze gegevens en levert dienovereenkomstig een stuursignaal aan het motorstuurprogramma IC LM293D, dat beide motoren aandrijft.
Brandbestrijdingsrobotvoertuig:
Het concept van brandbestrijding robotvoertuig vecht bij brand. In de afgelopen jaren hebben er verschillende ernstige ongevallen plaatsgevonden, waaronder brand en bomexplosies. We zijn op de hoogte van grote brandongevallen, zoals kerncentrales, petroleum-, gastank- en chemische fabrieken, grootschalige industriële brandbedrijven op deze plaatsen zodra de brand is begonnen, kan het resultaat zeer ernstig zijn. Bij deze incidentie zijn duizenden mensen omgekomen. Dat is een brandbestrijding robotvoertuig technologie. Dit robotvoertuig werd gebruikt om het vuur te vinden en voor de branden te vechten.

Brandbestrijdingsrobotvoertuig
Werkingsprincipe van brandbestrijdingsrobotvoertuigen:
Het robotvoertuig beladen met een watertankwagen. De pomp wordt bestuurd door draadloze communicatie (RF en mobiele communicatie). Het zenderuiteinde is verbonden met de drukknoppen. Met behulp van deze drukknop worden commando's naar de ontvanger gestuurd en het stuurmoment van de robotachtige vooruit, achteruit, links, rechts. De ontvangende kant zijn drie motoren verbonden met de microcontroller.

Zender blokschema

Ontvanger blokschema
RF-zender fungeert als RF-afstandsbediening waar het bereik 200 meter is. In huis, op kantoor en in de industrie worden de brandsensoren op bepaalde plaatsen bewaard als er brand ontstaat in de buurt van een brandsensor. De sensoren voelen aan dat het overeenkomstige bit naar de RF-ontvanger wordt verzonden. De RF-ontvanger is geïntegreerd met een microcontroller. Wanneer de RF-ontvanger de signalen ontvangt dat informatie naar de microcontroller gaat, beweegt de robot zich richting brandsensoren. De locaties van de sensoren worden opgeslagen in de microcontroller. Zodra de robot de gewenste locatie heeft bereikt, stopt de robot en activeert de sproeier voor dat vuur. Na het afvuren gaat de robot naar de beginpositie. Het hele circuit wordt bestuurd door de microcontroller.
Typen robotvoertuigen voor brandbestrijding:
Home Brandbestrijding Robotvoertuig
De veldactie is beperkt tot de huidige Flore of house. Deze robot gebruikt veel huishoudelijke artikelen om in brand te vliegen wanneer iemand slaapt of afwezig is. Deze robot wordt gebruikt om het huis te beveiligen en met deze applicatie worden alle deuren in Flore geopend omdat dit voertuig van de ene plaats naar de andere plaats in huis gaat. Het brandbestrijdingsgebied moet veilig zijn om geen nieuw ongeval te veroorzaken. Het extra kenmerk van deze robot is om op grote afstand te opereren.
Industriële brandbestrijding:
De meeste industrieën hebben te maken met brand, ongelukken, problemen zoals gas, benzine, kerncentrales, de chemische industrie, enorme hoeveelheden schade en een groter aantal mensen is dood in de buurt van omliggende gebieden. Deze robot heeft de kracht om vuur rond te dragen in het brandende gebied om onbeperkt water te leveren. Brand veroorzaakt verminderd zicht, extreme hitte en nog veel meer situaties die tot verwondingen kunnen leiden.
Bosbrandbestrijding:
Bosbranden zijn erg gevaarlijk. Het kan een korte tijd duren om een grote hoeveelheid bosgebied in brand te steken. Zelfs stadsbrandweerkorpsen hebben te maken met bosbranden in de omgeving van de stad. Enkele jaren geleden werden in de jaren negentig ongeveer 152 brandweerlieden gedood. De bosbrandrobotica gebruiken om het vuur te vangen en vechten in brand. Deze robot gebruikt een extern besturingsapparaat voor draadloze communicatiedoeleinden. De module is aangesloten waarvan de uitgang wordt gebruikt voor het blussen van de bosbranden van de robot. De toepassingen zoals druksensor, temperatuursensor, smogsensor, infraroodsensor, worden gebruikt voor het aansturen van de bosbrandbestrijdingsrobot.
Bij de prompt!
Hoewel ik een basisidee heb gegeven van de robot met een metaaldetector, bestaat er nog steeds een belangrijke vraag: hoe de robot te begeleiden op oneffen terreinen die onbekend zijn, vooral in omgevingen die zijn blootgesteld aan zware regenval, stof en een hoog temperatuurbereik. Om een antwoord te vinden en uw opmerkingen te plaatsen.