Servo spanningsstabilisator
Servo spanningsstabilisator is een regelmechanisme met gesloten lus dat dient om een gebalanceerde 3- of enkelfasige spanningsoutput te behouden ondanks fluctuaties aan de input als gevolg van ongebalanceerde omstandigheden. De meeste industriële belastingen zijn driefasige inductiemotorbelastingen en in een echte fabrieksomgeving is de spanning in 3 fasen zelden gebalanceerd. Stel bijvoorbeeld dat als de gemeten spanningen 420, 430 en 440 V zijn, het gemiddelde 430 V is en de afwijking 10 V.
Het percentage onbalans wordt gegeven door
(10V X 100) / 430V = 2,3% Het is te zien dat 1% spanningsonbalans de motorverliezen met 5% doet toenemen.
Aldus kan spanningsonbalans de motorverliezen verhogen van 2% tot 90% en daarom stijgt de temperatuur ook met een buitensporige hoeveelheid, wat resulteert in nog grotere verliezen en een verminderd rendement. Daarom wordt voorgesteld om een project op te starten om een gebalanceerde uitgangsspanning in alle 3 fasen te behouden.
Eenfase:
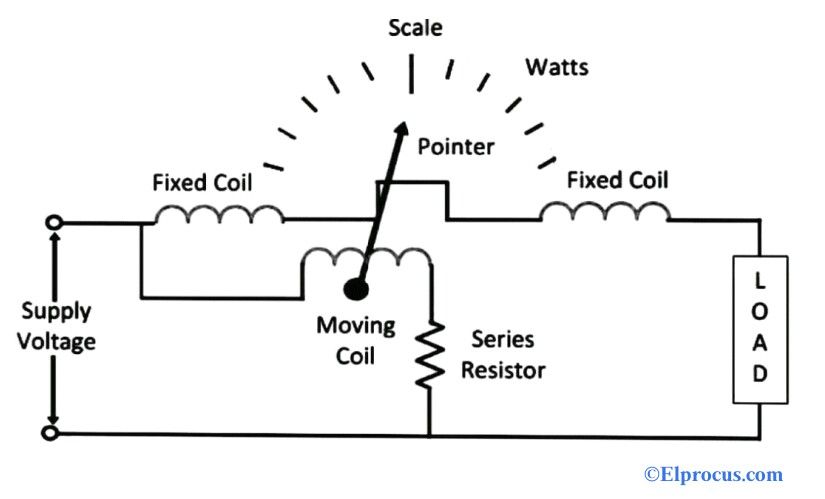
Het is gebaseerd op het principe van de vector-toevoeging van AC-spanning aan de ingang om de gewenste output te krijgen met behulp van een transformator genaamd Buck-Boost-transformator (T), waarvan de secundaire in serie is geschakeld met de ingangsspanning. De primaire daarvan wordt gevoed door een op een motor gemonteerde variabele transformator (R). Afhankelijk van de verhouding tussen primaire en secundaire spanning, komt de geïnduceerde spanning van de secundaire spanning in fase of uit fase op basis van de spanningsschommelingen De variabele transformator wordt meestal aan beide uiteinden gevoed vanuit de ingangsvoeding, terwijl het tikken op ongeveer 20% van de wikkeling wordt beschouwd als een vast punt voor de primaire van de Buck-Boost-transformator. Het variabele punt van de autotransformator kan daarom 20% uit-fasespanning leveren die wordt gebruikt voor bucking, terwijl 80% in fase is met de ingangsspanning en wordt gebruikt voor boostwerking. De wisserbeweging van de variabele transformator wordt bestuurd door het detecteren van de uitgangsspanning naar een regelcircuit dat de draairichting bepaalt van de synchrone motor die door een paar TRIAC's naar de gesplitste fasewikkeling wordt gevoerd.
3-fasen gebalanceerde ingangscorrectie:
Voor werking met een lage capaciteit, zeg ongeveer 10KVA, wordt momenteel gezien dat een dubbelgewonden variac wordt gebruikt, waardoor de Buck-Boost-transformator op de variabele transformator zelf wordt geëlimineerd. Dit beperkt de beweging van de wisser van een variac tot 250 graden, aangezien de balans wordt gebruikt voor de secundaire wikkeling. Hoewel dit het systeem economisch maakt, heeft het ernstige nadelen in termen van betrouwbaarheid. De industriestandaard accepteert een dergelijke combinatie nooit. In gebieden met een redelijk gebalanceerde ingangsspanning, worden driefasige servogestuurde correctoren ook gebruikt voor gestabiliseerde uitvoer, terwijl een enkele driefasige variac wordt gebruikt, gemonteerd door een synchrone motor en een enkele stuurkaart die de tweefasige spanning van drie detecteert. Dit is veel zuiniger en nuttiger als de invoerfasen redelijk in balans zijn. Het nadeel is dat bij ernstige onbalans de output proportioneel onevenwichtig is.
3-fasen ongebalanceerde ingangscorrectie:
Drie serietransformatoren (T1, T2, T3), waarvan elke seconde wordt gebruikt, één in elke fase die de spanning optelt of aftrekt van de ingangsvoedingsspanning om een constante spanning te leveren in elke fase, waardoor de gebalanceerde uitgang wordt verkregen uit een ongebalanceerde ingang. De ingang naar de primaire transformator van de serietransformator wordt gevoed vanuit elke fase van elke variabele autotransformator (Variac) (R1, R2, R3) waarvan elke wisser is gekoppeld aan een synchrone motor met wisselstroom (2 spoelen) (M1, M2 M3). De motor ontvangt wisselstroom voor elk van zijn spoelen via thyristorschakeling voor rotatie met de klok mee of tegen de klok in om de gewenste uitgangsspanning van de variac naar de primaire van de serietransformator mogelijk te maken, hetzij in fase of uit fase, om optellen of aftrekken uit te voeren zoals vereist aan de secundaire zijde van de serietransformator om een constante en gebalanceerde spanning aan de uitgang te behouden. Feedback van de uitgang naar het regelcircuit (C1, C2, C3) wordt vergeleken met een vaste referentiespanning door niveaucomparatoren die zijn gevormd uit op-amps om uiteindelijk de TRIAC te activeren volgens de noodzaak om de motor aan te drijven.
Dit schema bestaat voornamelijk uit een regelcircuit, een enkelfasige servo-inductiemotor die is gekoppeld aan een variacale primaire voeding van een serietransformator voor elke fase.
- Besturingscircuit bestaande uit een venstercomparator die is bedraad rond transistors en RMS-foutsignaalspanningsversterking door IC 741 is opgetuigd in Multisim en wordt gesimuleerd voor verschillende ingangsomstandigheden, waardoor wordt gewaarborgd dat de TRIAC's worden geactiveerd die de inductiemotor met faseverschuiving van de condensator zouden bedienen. die de rotatie van de variac-wisser regelt.
- Op basis van de maximale en minimale waarden van spanningsfluctuaties, zijn de serietransformator en de besturingstransformatoren ontworpen met behulp van een standaardformule die overeenkomt met de in de handel verkrijgbare ijzeren kern en de supergeëmailleerde koperdraadafmetingen voordat ze hetzelfde worden gewikkeld voor gebruik in het project.
Technologie:
In een gebalanceerd driefasig voedingssysteem hebben alle spanningen en stromen dezelfde amplitude en zijn ze 120 graden in fase verschoven ten opzichte van elkaar. Het is echter praktisch niet mogelijk omdat ongebalanceerde spanningen nadelige effecten kunnen hebben op apparatuur en het elektrische distributiesysteem.
Onder onevenwichtige omstandigheden zal het distributiesysteem meer verliezen en verwarmingseffecten oplopen en minder stabiel zijn. Het effect van spanningsonbalans kan ook nadelig zijn voor apparatuur zoals inductiemotoren, vermogenselektronische omvormers en snelheidsregelaars (ASD's). Een relatief klein percentage spanningsonbalans met driefasige motor resulteert in een aanzienlijke toename van motorverliezen, wat ook een afname van het rendement met zich meebrengt. Energiekosten kunnen in veel toepassingen worden geminimaliseerd door het motorvermogen dat verloren gaat door spanningsonbalans te verminderen.
Percentage spanningsonbalans wordt door NEMA gedefinieerd als 100 keer de afwijking van de lijnspanning van de gemiddelde spanning gedeeld door de gemiddelde spanning. Als de gemeten spanningen 420, 430 en 440 V zijn, is het gemiddelde 430 V en is de afwijking 10 V.
Het percentage onbalans wordt gegeven door (10V * 100 / 430V) = 2,3%
Dus 1% spanningsonbalans verhoogt de motorverliezen met 5%.
Daarom is onbalans een ernstig probleem van de netvoedingskwaliteit, dat voornamelijk laagspanningsdistributiesystemen treft en daarom wordt in het project voorgesteld om in elke fase een gebalanceerde spanning met betrekking tot de grootte te handhaven, waardoor een gebalanceerde lijnspanning wordt gehandhaafd.
INVOERING:
A.C. Spanningsstabilisatoren zijn bedoeld voor het verkrijgen van een gestabiliseerde wisselstroom. voeding van het fluctuerende inkomende net. Ze vinden toepassingen op elk gebied van elektrische, elektronische en vele andere industrieën, onderzoeksinstellingen, testlaboratoria, onderwijsinstellingen, enz.
Wat is onbalans
Onbalansconditie verwijst naar de toestand waarin de driefasespanningen en stromen niet dezelfde amplitude of dezelfde faseverschuiving hebben.
Als aan een of beide voorwaarden niet wordt voldaan, wordt het systeem ongebalanceerd of asymmetrisch genoemd. (In deze tekst wordt er impliciet van uitgegaan dat de golfvormen sinusvormig zijn en dus geen harmonischen bevatten.)
Oorzaken van onbalans:
De netbeheerder probeert een gebalanceerde systeemspanning te leveren op de PCC tussen het distributienet en het interne netwerk van de klant.
De uitgangsspanningen in het driefasensysteem zijn afhankelijk van de uitgangsspanningen van de generatoren, de impedantie van het systeem en de belastingsstroom.
Omdat echter meestal synchrone generatoren worden gebruikt, zijn de gegenereerde spanningen zeer symmetrisch en kunnen de generatoren dus niet de oorzaak zijn van onbalans. Verbindingen met lagere spanningsniveaus hebben meestal een hoge impedantie, wat leidt tot een mogelijk grotere spanningsonbalans. De impedantie van de systeemcomponenten wordt beïnvloed door de configuratie van bovenleidingen.
Gevolgen van spanningsonbalans:
De gevoeligheid van elektrische apparatuur voor onbalans verschilt van apparaat tot apparaat. Hieronder volgt een kort overzicht van de meest voorkomende problemen:
(a) Inductiemachines:
Dit zijn de a.c. synchrone machines met intern geïnduceerde roterende magnetische velden, waarvan de grootte evenredig is met de amplitude van directe en / of inverse componenten. Daarom wordt in het geval van een ongebalanceerde voeding het roterende magnetische veld elliptisch in plaats van cirkelvormig. dus inductiemachines worden voornamelijk geconfronteerd met drie soorten problemen als gevolg van spanningsonbalans
1. Ten eerste kan de machine niet zijn volledige koppel produceren, aangezien het omgekeerd roterende magnetische veld van het negatieve sequentiesysteem een negatief remkoppel produceert dat moet worden afgetrokken van het basiskoppel dat is gekoppeld aan het normale roterende magnetische veld. De volgende afbeelding toont de verschillende koppelslipkenmerken van een inductiemachine bij ongebalanceerde toevoer

2. Ten tweede kunnen de lagers mechanische schade oplopen door componenten van het geïnduceerde koppel bij dubbele systeemfrequentie.
3. Ten slotte worden de stator en vooral de rotor overmatig verwarmd, wat mogelijk leidt tot snellere thermische veroudering. Deze warmte wordt veroorzaakt door de inductie van significante stromen door het snel roterende (in relatieve zin) inverse magnetische veld, zoals gezien door de rotor. Om met deze extra verwarming om te kunnen gaan, moet de motor worden verlaagd, waardoor mogelijk een machine met een groter vermogen moet worden geïnstalleerd.
TECHNO-ECONOMIE:
De spanningsonbalans kan voortijdige motorstoring veroorzaken, wat niet alleen leidt tot ongeplande uitschakeling van het systeem, maar ook tot grote economische verliezen.
De effecten van laag- en hoogspanning op motoren en de gerelateerde prestatieveranderingen die kunnen worden verwacht wanneer we andere spanningen gebruiken dan die vermeld op het typeplaatje, worden als volgt weergegeven:
Effecten van laagspanning:
Wanneer een motor wordt blootgesteld aan spanningen onder de nominale waarde van het typeplaatje, zullen sommige kenmerken van de motor enigszins veranderen en andere drastisch.
De hoeveelheid stroom die uit de lijn wordt gehaald, moet worden vastgesteld voor een vaste hoeveelheid belasting.
De hoeveelheid stroom die de motor trekt, heeft een ruwe correlatie met de spanning naar stroom (ampère).
Om hetzelfde vermogen te behouden, als de voedingsspanning laag is, dient een toename van de stroom als compensatie. Het is echter gevaarlijk omdat een hogere stroom ervoor zorgt dat er meer warmte wordt opgebouwd in de motor, waardoor de motor uiteindelijk kapot gaat.
De nadelen van het aanleggen van laagspanning zijn dus oververhitting van de motor en de motor is beschadigd.
Het startkoppel, het ophaalkoppel en het uittrekkoppel van een grote belasting (inductiemotoren), gebaseerd op de aangelegde spanning in het kwadraat.
Over het algemeen kan een vermindering van 10% ten opzichte van de nominale spanning leiden tot een laag startkoppel, optrek- en uittrekkoppel.
Effecten van hoogspanning:
Door hoge spanning kunnen de magneten verzadigd raken, waardoor de motor te veel stroom trekt om het strijkijzer te magnetiseren. Zo kan hoogspanning ook tot schade leiden. Hoogspanning vermindert ook de arbeidsfactor, waardoor de verliezen toenemen.
Motoren tolereren bepaalde wijzigingen in de spanning boven de ontwerpspanning. Wanneer de extremen boven de ontwerpspanning ervoor zorgen dat de stroom stijgt met overeenkomstige veranderingen in verwarming en een verkorting van de levensduur van de motor.
De spanningsgevoeligheid heeft niet alleen invloed op motoren, maar ook op andere apparaten. De solenoïdes en spoelen in relais en starters verdragen laagspanning beter dan hoogspanning. Andere voorbeelden zijn voorschakelapparaten in fluorescentie-, kwik- en hogedruknatriumarmaturen en transformatoren en gloeilampen.
Over het algemeen is het beter voor de apparatuur als we de kranen op inkomende transformatoren veranderen om de spanning op de fabrieksvloer te optimaliseren tot iets dat in de buurt komt van de apparatuurclassificaties, wat het belangrijkste concept is achter het voorgestelde concept van spanningsstabilisatie in het project.
Regels om de voedingsspanning te bepalen
- Kleine motoren zijn over het algemeen gevoeliger voor overspanning en verzadiging dan grote motoren.
- Eenfasemotoren zijn meestal gevoeliger voor overspanning dan driefasige motoren.
- U-frame-motoren zijn minder gevoelig voor overspanning dan T-frames.
- Premium efficiency Super-E-motoren zijn minder gevoelig voor overspanning dan standaard efficiency-motoren.
- 2- en 4-polige motoren worden doorgaans minder beïnvloed door hoogspanning dan 6- en 8-polige ontwerpen.
- Overspanning kan de stroomsterkte en temperatuur verhogen, zelfs bij licht belaste motoren
- De efficiëntie wordt ook beïnvloed als deze wordt verminderd met lage of hoge spanning
- De arbeidsfactor neemt af bij hoogspanning.
- De inschakelstroom gaat omhoog met een hogere spanning.
Krijg meer kennis over verschillende elektronische concepten en circuits door wat mini te doen elektronica projecten op technisch niveau.