
De dood is iets dat onvermijdelijk is. Maar hoe zit het met een plotselinge dood alleen vanwege een ongeluk op de weg of nog erger - een verwonding die iemands leven voor altijd kan verpesten. Geeft het niet een rilling over je rug, gewoon door eraan te denken? Wat is de belangrijkste reden achter de ongevallen? Natuurlijk roekeloos rijden en overhaast rijden met voertuigen, vooral op een gladde weg zoals op de snelweg.
Volgens een statistisch rapport waren in de periode van 2005-2009 ongeveer 1200 doden te wijten aan ongevallen als gevolg van overhaast rijden. En wat meer is, u kunt bijna dagelijks nieuws krijgen over ongevallen als gevolg van een onbezonnen bestuurder.
Dus, is er een manier om dit te voorkomen? Natuurlijk!
Er kunnen verschillende manieren zijn, zoals een goede chauffeur zijn en de verkeersregels volgen, een normale snelheid aanhouden. Maar er is een belangrijke manier en dat is waakzaam blijven op de snelheid van het voertuig en deze dienovereenkomstig controleren.
Dit kan technologisch worden gedaan door een manier te bedenken om de snelheid van het voertuig te controleren.
2 manieren om de snelheid te controleren:
- Snelheidssensoren installeren aan de wegkant of in het midden van de weg
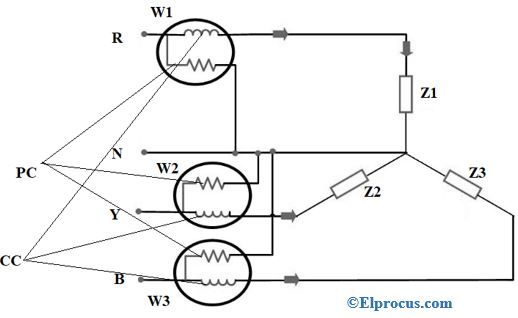
- Met videobeeldprocessors : Het bestaat uit een camera die op de palen van bermen is geïnstalleerd en die constant de situatie in de gaten houdt door snel opeenvolgende beelden te maken. De verkeersstroomparameters worden dienovereenkomstig geanalyseerd en verwerkt in een signaalprocessor.

Afbeelding van verkeersmonitoring door videocamera
- RADAR opnemen op de rijstroken Een RADAR kan worden gebruikt om de snelheid van het voertuig te controleren door een signaal in microgolfband naar het voertuig te sturen en een verschuiving in frequentie van het gereflecteerde signaal te analyseren. RADAR staat voor Radio Detection and Ranging. Het uitgezonden signaal kan een signaal zijn met een constante frequentie of een veranderende frequentie. Normaal gesproken wordt een CW Doppler RADAR ingezet op de paal van de wegkant.

Snelheidsdetectie met behulp van RADAR
- IR-sensoren installeren : IR-sensoren met een combinatie van IR-led en fotodiode kunnen worden gebruikt om de door het voertuig afgelegde afstand te volgen en tegelijkertijd de snelheid te berekenen. Het basisidee omvat het plaatsen van een paar IR-leds en fotodiode met regelmatige tussenpozen aan weerszijden van de weg en het bewaken van de onderbreking van het pad tussen de IR-led en de fotodiode door het voertuig.
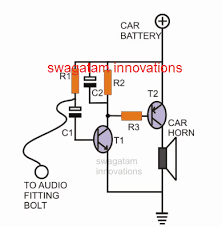
Hier is een eenvoudig prototype van de bovenstaande methode. Het voorbeeldprototype werkt met twee paar IRLED-fotodiodes.

Een prototype circuit van snelheidscontrole met behulp van IR-sensor door Edgefx-kits
Het bestaat uit de volgende secties:
- Een fotodiode-LED-paar om het voertuig te detecteren
- Een teller om de tijd weer te geven die het voertuig nodig heeft om het pad tussen de twee fotodiode-geleide paren te kruisen.
- Een zoemer om aan te geven of de snelheid hoger is dan de ingestelde limiet.
- Timer-IC's om de signalen op de juiste timing te leveren.
- Met behulp van LIDAR-pistool : Een LIDAR is een op LASER gebaseerd detectie- en bereiksysteem. De verkeersagent kan een draagbaar LIDAR-pistool dragen dat een korte uitbarsting van infrarood licht uitzendt en aangezien dit licht wordt teruggekaatst door het rijdende voertuig, houdt het pistool rekening met de tijd die het gereflecteerde signaal in beslag neemt en dat wordt gedeeld door twee om te meten de afstand. De snelheid wordt gemeten door het aantal monsters te delen door een vaste tijdsduur van enkele seconden. Het werkt op dezelfde manier als een RADAR-systeem, behalve dat het lichtgolven gebruikt in plaats van radiogolven.

Een LIDAR-pistool in de handen van een verkeersagent
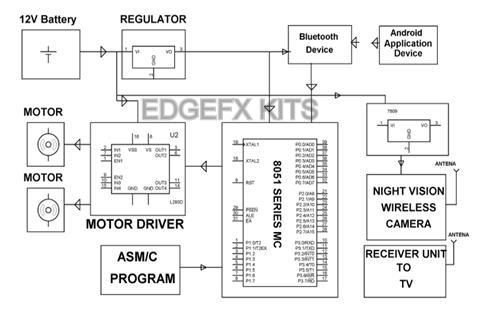
Werking van Speed Checker-systeem met behulp van IR-sensoren

Blokschema dat de werking van het snelheidscontrolesysteem met IR-sensoren laat zien door Edgefx-kits
Wanneer een voertuig het pad kruist tussen het eerste paar IRLED-fotodiodes, blokkeert het de weg van het licht en neemt de weerstand van de fotodiode toe, waardoor een overeenkomstig laag signaal naar de timer IC1 wordt gestuurd. De timer IC1 produceert een hoog signaal aan zijn uitgang gedurende een vaste duur van 10 ms. Onder normale omstandigheden, bij normale snelheid, zal er geen onderbreking zijn in het pad tussen de 2ndFotodiode-IR LED-paar en de overeenkomstige ingang naar de timer IC2 zullen hoog zijn, waardoor een laag logisch signaal aan de uitgang wordt veroorzaakt. De outputs van beide timers zijn verbonden met NAND-poort 2m die een hoge output geeft (voor lage en hoge inputs), verbonden met de input van timer IC3. De corresponderende output van de timer IC is laag, waardoor de zoemer uit staat. Tegelijkertijd wordt de uitvoer van de timer IC1 aan beide ingangen van NAND-poort1 gegeven, wat een lage logische output geeft die aan timer IC4 wordt gegeven om een hoge logische output te geven, verbonden met de reset-pin van timer IC5. De output van timer IC5 is overeenkomstig hoog, waardoor een hoge puls wordt afgegeven aan de teller IC. Het tellergedeelte bestaat uit een decenniumteller met 4 fasen om de telling van meerdere cijfers te lezen. Elke teller-IC-klok is verbonden met de klokuitgang van de vorige teller-IC. De teller verhoogt zijn telling bij elke stijgende flank van de klokpuls.
Stel nu dat het voertuig met zo'n hoge snelheid rijdt dat het het pad tussen het tweede IRLED-fotodiodepaar bereikt in de tijdsduur die is ingesteld voor de timer IC1. Dus nu zal de teller een telling onder de normale telling laten zien en tegelijkertijd, aangezien NAND-poort2 hoog zal worden bij beide ingangen, wordt de uitgang laag en overeenkomstig ontvangt de timer IC3 een lage ingang om een hoge logische uitgang te geven en dienovereenkomstig activeer het zoemeralarm.
Dus de afstand tussen de twee paren gedeeld door de tellerstand geeft de snelheid van het voertuig weer en als deze snelheid de gegeven limiet verhoogt, gaat de zoemer af en geeft een duidelijke indicatie dat de snelheidslimiet is overschreden.
Ik heb een gedetailleerde uitleg gegeven van een van de manieren. Alle andere manieren zijn welkom om als feedback te worden gegeven.
Foto tegoed:
- Verkeersagent met een LIDAR-pistool voorbij Wikimedia






{kind=link}