Het elektromechanische apparaat of de machine die voor verschillende doeleinden wordt gebruikt en wordt bestuurd en bediend met behulp van programmeertechnieken, wordt een robot genoemd. De robots zijn verschillende typen op basis van hun toepassingen, zoals industriële robots , militaire robots, ruimterobots, huishoudelijke robots, lopende robots, klimrobots, enzovoort. De meest geavanceerde robotica projecten worden ontwikkeld voor effectief gebruik op verschillende gebieden voor verschillende toepassingen. Laten we in dit artikel een speciaal type robotica-projecten bespreken, namelijk lijnvolgend robotvoertuig met loop- en klimmechanisme.
Robotvoertuig

Robotica-projecten voor technische studenten
De robotvoertuigen zijn speciale soorten machines die zijn ontworpen om autonoom over de grond, in de lucht, onder water en in de ruimte te bewegen zonder dat er een mens aan boord is. Deze robotvoertuigen worden bestuurd en bediend door verschillende sensoren gebaseerde controlesystemen. De robotvoertuigen zijn speciaal ontworpen voor gebruik in omstandigheden waarin mensen niet kunnen binnendringen, zoals brandongelukken, zeer hoge of zeer lage temperaturen, enz.,.
Lijnvolger Robot

Lijnvolger Robot
Het robotvoertuig dat beweegt door een specifiek pad of lijn te volgen, kan worden aangeduid als een lijnvolger robot Deze lijnvolgerrobots worden speciaal gebruikt in industriële toepassingen voor speciale doeleinden zoals het transporteren van verschillende onderdelen of machines of voertuigen (auto's, fietsen, enz.) Door de specifieke lijn van het ene punt (generatoraggregaat) naar een ander punt (assemblage-eenheid) te volgen. .
De normale lijn die een robotvoertuig volgt met speciale functies zoals loop- en klimmechanisme is een van de interessante robotica-projecten voor ingenieursstudenten , die voor verschillende toepassingen kan worden gebruikt. Hieronder ziet u eenvoudige stappen om een lijnvolgerrobot met loop- en klimmechanisme te ontwerpen.
Stap 1: Vereiste componenten verzamelen

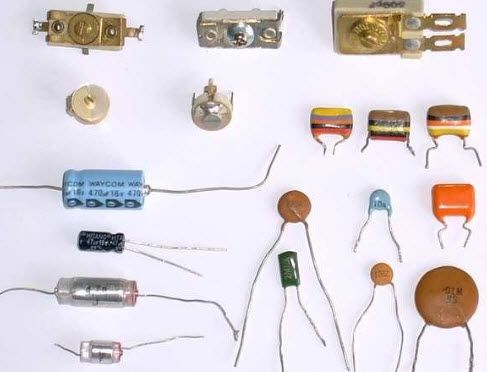
Elektrische en elektronische componenten
De componenten die nodig zijn voor de ontwerplijn die een robotvoertuig met loop- en klimmechanisme volgt, moeten worden geschat op basis van robottoepassing. Verzamel alle elektrische en elektronische componenten zoals weerstanden, condensatoren, IR-zenders, DC-motoren, transistors, robotlichaam en fotodiodes met de juiste waarden, samen met andere onderdelen zoals karton, bouten, moeren, aluminium strips, enz., Volgens de vereisten.
Stap 2: Analyse van het circuit voor lijnvolgerrobot

Lijnvolgend robotvoertuig uitbreidbaar tot robotblokdiagram voor lopen en klimmen
Ontwerp in de eerste plaats een blokschema van projectcircuits met verschillende blokken zoals een voedingsblok , IR LED & fotodiode blok enzovoort. Na het verzamelen van componenten, analyseert u het circuitontwerp op basis van het werken met verschillende gebruikte componenten. Plaats vervolgens de componenten op een soldeerloos breadboard volgens het schakelschema met behulp van verbindingsdraden om de werking van het circuit te testen voordat u het circuit op de PCB monteert. Door het circuit te testen op een soldeerloos breadboard als er wijzigingen nodig zijn in het circuit of de beoordelingen van de componenten, kunnen wijzigingen eenvoudig worden uitgevoerd zonder geld en tijd te verspillen aan het vervangen van componenten of het ontwerp van het circuit te wijzigen.
Stap 3: Componenten monteren en solderen

Lijnvolgend robotvoertuig uitbreidbaar tot loop- en klimrobotproject
Dus, na analyse van het circuitontwerp, monteert u de componenten volgens het schakelschema over de printplaat. Soldeer vervolgens het circuit met een soldeerpistool en soldeerdraad volgens de juiste soldeerrichtlijnen. Verbind alle onderdelen van de robot op de juiste manier om een lijnvolgerrobot te vormen zoals weergegeven in de bovenstaande afbeelding en lijm de onderdelen van het robotvoertuig indien nodig vast.
Stap 4: Werking van Line Follower Robot
De IR-zender en fotodiode worden gebruikt als foto sensor paar dat kan worden gebruikt voor het detecteren van het opgegeven pad voor de beweging van de lijnvolgerrobot tijdens het lopen en klimmen op muren. Het fotosensorpaar geeft passende signalen om de transistors te schakelen voor het aandrijven van de motoren van de lijnvolgerrobot.
Stap 5: Lijnvolger-robotvoertuig met loop- en klimmechanisme
Er zijn er tal van robotica-projecten voor ingenieursstudenten in welke lijnvolger robotvoertuig met loop- en klimmechanisme is een innovatief en interessant project om zelf te ontwerpen door ons gratis eBook te gebruiken om elektronicaprojecten te ontwerpen.
De toepassing van robotica neemt snel toe in ons dagelijks leven voor verschillende functies zoals industriële toepassingen - verplaatsen of tillen van zware producten, transport binnen een beperkt gebied door een specifiek pad te volgen, verwerking, lassen, huishoudelijke apparaten, autonome robots, militaire robots voor het verminderen van menselijke betrokkenheid & gevaar, collaboratieve robots voor interactie met de mens zodat voor het uitvoeren van verschillende taken, educatieve robots, mobiele robots en mensachtigen.
Ben je geïnteresseerd in ontwerpen elektronica projecten in je eentje? Weet jij hoe je humanoïde robots moet ontwikkelen? Als je meer wilt weten over robotica-projecten voor ingenieursstudenten, dan kun je je vragen, opmerkingen, ideeën en suggesties posten in het commentaargedeelte hieronder voor technische hulp.